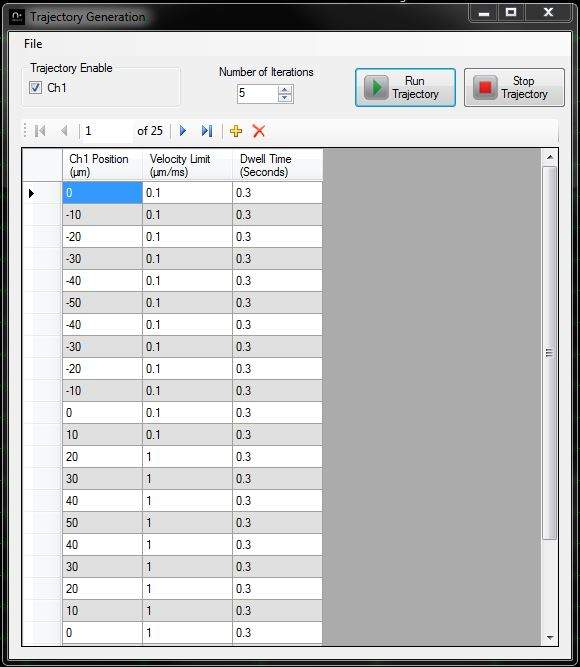
Trajectory Generation is the latest feature on nPoint’s nPControl software environment for the LC.400 Series Nanopositioning Controllers. The trajectory generation interface allows a user to scan through up to 500 position coordinates, with velocity and dwell time specified individually for each positioning event. These coordinates are downloaded to the controller for operation. The trajectory generation mode is an additional software environment that enables users to create motion control scenarios where changes in position and velocity are required over standard waveform scans. It comes standard with all LC.400 series controllers and can be used with multi-channel operation.
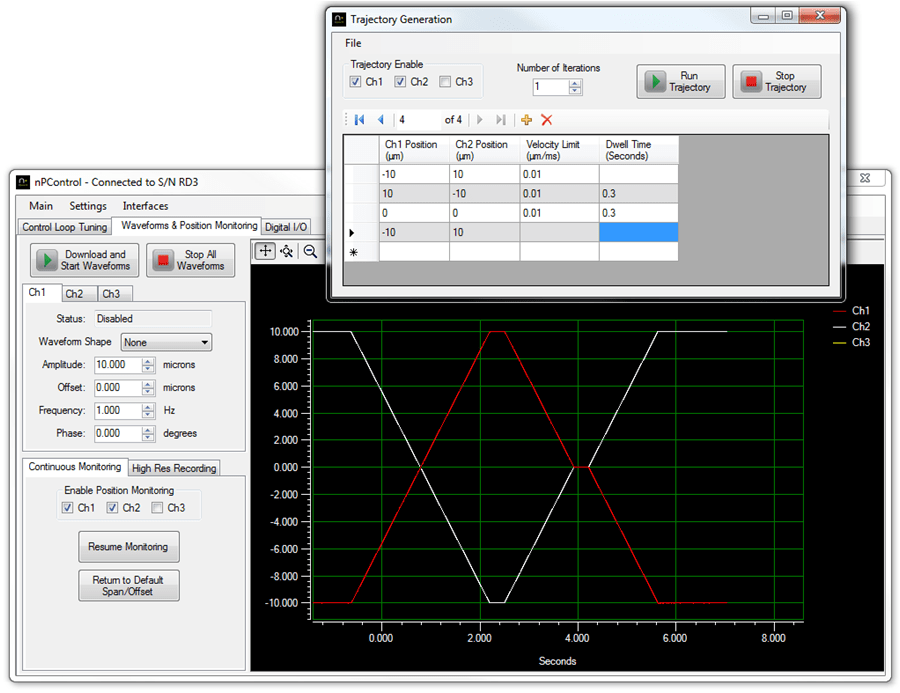
Each row in the trajectory generation grid represents a coordinate. The axis positions, velocity, and desired dwell time for the stage to travel to the next coordinate can be set for each position. It is possible to simply click “Run Trajectory” and start the scan or set up a TTL signal to begin the program. The nanopositioner will immediately move from the set static position into the programmed scanning modes.
The current set of coordinates can be saved to a CSV file, or coordinate sets can be loaded from a CSV file from the File menu. This allows generation or editing of coordinate sets from programs like Microsoft Excel or Matlab. The trajectory generation feature of the LC.400 series controllers can be used with any applicable piezo stage. Velocity limits vary for each stage due to scanning speed differences between systems for factors including travel range, load mass, and stage design.
Please contact nPoint for more details on trajectory Generation and Piezo Positioners.