Please enable Javascript in your browser.
Home - Stages - Piezo - Software
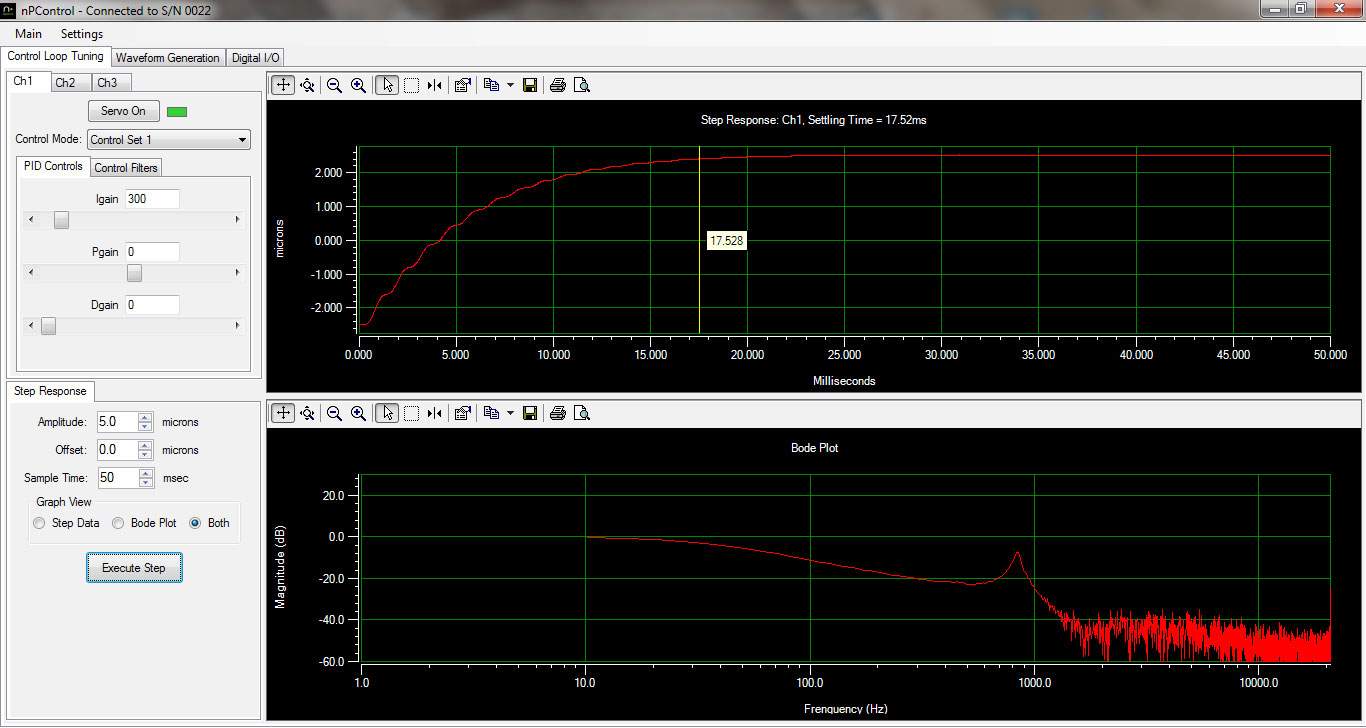
nPControl Nanopositioner Software
Novanta Acquires Motion Solutions
Learn More