Perfecting the Motion of Things with Precision and Speed
Creating custom designs to solve complex motion control problems.
We co-innovate with your team taking ideas from product concept to full scale production
We Design and Manufacture Mechatronics Solutions for
Featured Solution
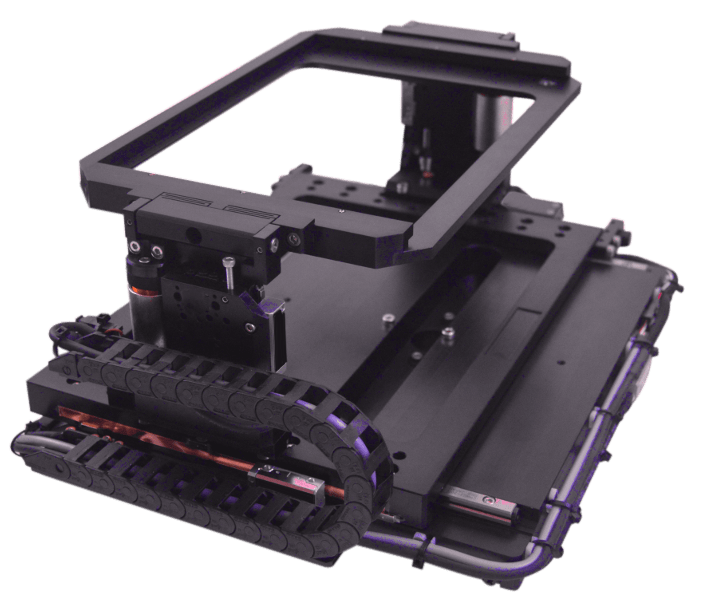
XZ Stage for Tight Space
Tight space requirement? No problem! Our Motion Solutions engineering staff designed this very compact multi-axis XZ gantry for life science instrumentation.
Best-in-Class Partners
